Cartographer
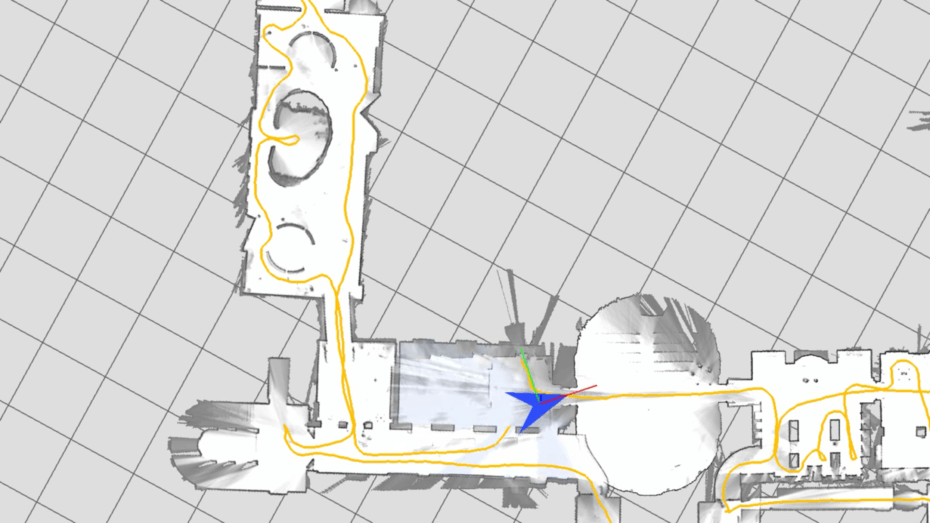
Google zverejnil zdrojové kódy knižnice pre simultánne mapovanie a lokalizáciu v reálnom čase pomocou senzorov a kamier.
Knižnica sa dá použiť pre autonómne riadenie vozidiel, vysokozdvižných vozíkov či robotických vysávačov. Hotová je aj integrácia s ROS (Robot Operating System).
Zdroj: opensource.googleblog.com

Pre pridávanie komentárov sa musíte prihlásiť.